Наконец настало время собирать звенья робо-руки. Первое на очереди звено номер четыре - кисть.

Начать сборку необходимо с подготовки основания кисти (у меня усиленная деталь - см. предыдущий пост): устанавливаем в нее 608 подшипники, гайку, и винт натяжителя ремня.

Латунные резьбовые втулки, которые я купил на Ali оказались меньше по диаметру, чем те, которые были заложены в модель. А, так как деталь уже была напечатана - пришлось сделать дополнительную переходную втулку.
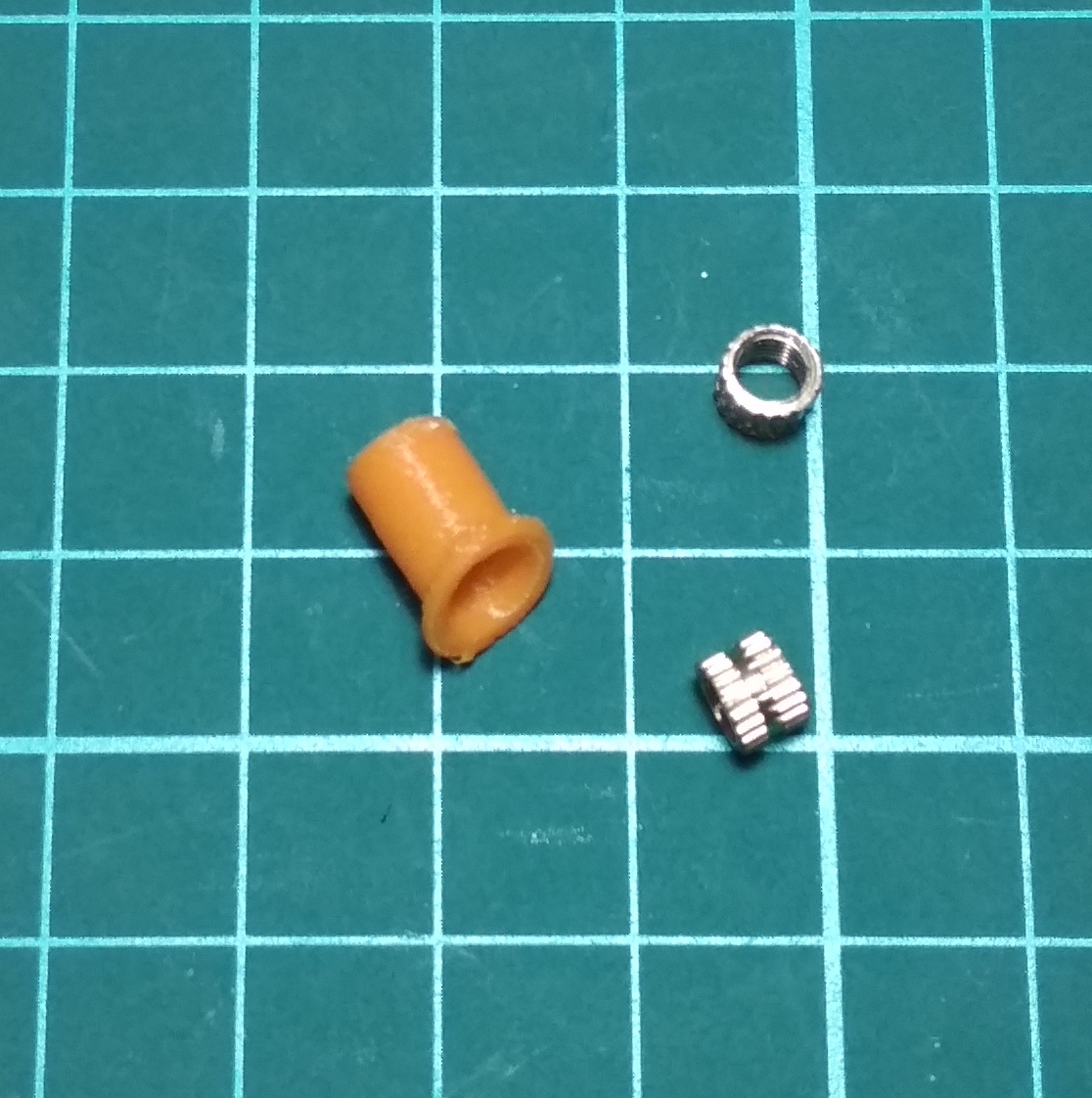
Втулка получилась тонкостенной, поэтому установка резьбовых втулок "по-горячему" ее сразу деформировала - пришлось их просто впрессовать, затянув винтом М4х16 - он же используется для толкания натяжителя ремня. Тонкие стенки не дают сильно натянуть ремень - втулка лопается. В следующей версии надо будет переработать этот элемент в основании для установки латунной втулки без переходника.

Отверстие под доработанную таким образом резьбовую втулку необходимо рассверлить до диаметра 6,5 мм.
Далее следует подготовить подвижную часть кисти с установленным захватом. Подготовка заключается в надевании зубчатого ремня. При таком способе установки крепления как у меня, длина ремня получается 255 мм (51 зуб).

После этого необходимо зафиксировать шкив 10Т на валу двигателя Nema 14. К сожалению, вал моего двигателя был без лыски, пришлось сделать ее надфилем самому.
Переходим с сборке шарнира. Подвижную часть кисти необходимо поместить в основание. После этого можно устанавливать двигатель, продев шкив через петлю ремня. Винты М3х8 лучше установить в крепежные отверстия основания заранее.

Пока подвижная часть кисти не установлена на валу, в зазор между ремнем и корпусом устанавливается натяжитель ремня. После этого вал шарнира продевается через подшипники и подвижный вкладыш.

Завершающий этап - установка крышек и винта натяжителя. Все, кисть готова к сборке с предыдущем звеном.
Спасибо за внимание! Let`s go design!
Комментарии
Отправить комментарий